

运动平台主要技术参数介绍

1.分辨率
分辨率是指系统可实现的最小可能运动。可分为电子、编码器和机械系统分辨率。
2.西格玛
西格玛(s)是标准方差。它代表给定过程偏离名义值的程度,越小越好。对于正态分布的运动,通常假定位置值为正态分布,3s=0.1微米(=2角秒)的结果 能保证99.7%的测量值在±0.1微米内(2s=0.1微米为95.4%的测量值在±0.1微米内,s=0.1微米为68.3%的测量值在±0.1微米 内)或±2角秒(2s=2角秒为95.4%的测量值在±2角秒内,s=2角秒为68.3%的测量值在±2角秒内)。
3.精度
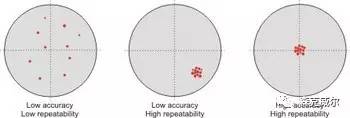
精度是指机械系统的实际位置与希望位置之间的差值。通常用一定行程内±3西格玛偏差,用微米或角秒单位表示。例如±3西格玛、300mm(300)行程的精 度为±3µm(±20角秒),那么如果该轴从当前位置运动到300 mm(300)位置,终点位置99.7%的可能将在299.997(300.0056度)与300.003(299.9944度)之间。精度受反馈系统 (编码器、激光干涉仪等)、驱动系统及轴承类型的影响。
4.重复精度
重复精度是指运动系统在相同条件下多次可靠地达到指定位置的能力。单向重复精度是指仅在一个方向上(并忽略传动系统中反向间隙或粘滞的影响)重复定位运动的能力。双向重复精度是双方向重复运动的能力。默认情况下,重复精度测量值是指空载时的重复精度。
5.阿贝误差

阿贝误差是一种直线定位误差,它由导轨(运动导轨)倾斜误差以及测量设备(丝杠,编码器等)与实际被测点间偏移距离共同决定。
?=h x tan?
其中h代表编码器与刀尖之间的距离。
为最大限度减少阿贝误差,必须尽可能减少距离h。
6.迟滞误差
迟滞误差指是实际位置与指令位置之间由于运动系统中积蓄的弹力造成的误差。它影响精度及双向重复精度。
7.反向间隙
反向间隙是指改变运动方向导致的定位误差。它由机械传动系统部件之间的间隙导致。反向间隙也影响双向重复精度。反向间隙可被位置控制单元补偿。
8.摩擦系数
摩擦系数是移动负载所需力与该负载大小的比。有两种系数:静摩擦系数与动摩擦系数(静摩擦系数大于动摩擦系数)。
9.负荷周期
对于重复性的周期,负荷周期是指“工作”时间占总周期时间的比例。负荷周期 = (工作时间/(工作时间 + 非工作时间)) x 100%。
10.轴向跳动

轴向跳动是指回转工作台在水平面内转动时工作台顶面在垂直方向上的定位误差。
11.径向跳动

径向跳动是指回转工作台在水平面中转动中工作台定心圆周在水平方向上的定位误差。
12.平面度

平面度是指运动面上的垂直偏差。
13.水平直线度

水平直线度是指运动直线的水平偏差。沿X轴运动的水平直线度偏差将导致Y轴方向定位误差。
14.垂直直线度

垂直直线度是指运动直线的垂直偏差。沿X轴方向运动的垂直直线度偏差将导致Z轴方向的定位误差。
15.垂直度
垂直度是两个堆叠轴运动直线间的垂直度。如果两条运动直线不垂直,Y轴运动将在X轴方向造成定位误差(对于X-Y工作台)。
16.俯仰

俯仰是在垂直于运动方向的水平面中(例如下面说的)围绕轴的自转(相对理想运动直线的倾斜偏差)。对于X轴运动,俯仰将导致X轴与Z轴方向的阿贝误差。
17.横滚

横滚是在平行于运动方向的水平面中(例如下面说的)围绕轴的自转(相对理想运动直线倾斜的角度偏差)。对于X轴运动,横滚将导致Y轴与Z轴方向的阿贝误差。
18.摆动

摆动是指垂直于连接板的垂线与旋转实际轴之间的角度误差,而贝塔(b)与伽马(g)角已被修正。
(a): 固定面的角度
(b): 旋转的实际轴与回转工作台基础面间的角度
(g): 垂直于连接板直线与旋转实际轴间的角度
19.偏向

偏向是指垂直于运动方向在垂直面中(例如下面说的)围绕轴的自转(相对理想的运动直线的角度偏差)。对于X轴运动,偏向将导致X轴与Z轴方向的阿贝误差。
20.热膨胀
热膨胀是温度变化导致的系统尺寸与形状的变化。变化的程度与部件的尺寸、温度变化程度以及材质性质有关。
